On this Innovation Lab page, we will explain how to implement a waste level management application using the A121 Pulsed Coherent Radar sensor. The Evaluation Kit, such as XE121 Evaluation Board and XC120 Connector Board, are used together with the FZP lens from the Acconeer Lens Kit.
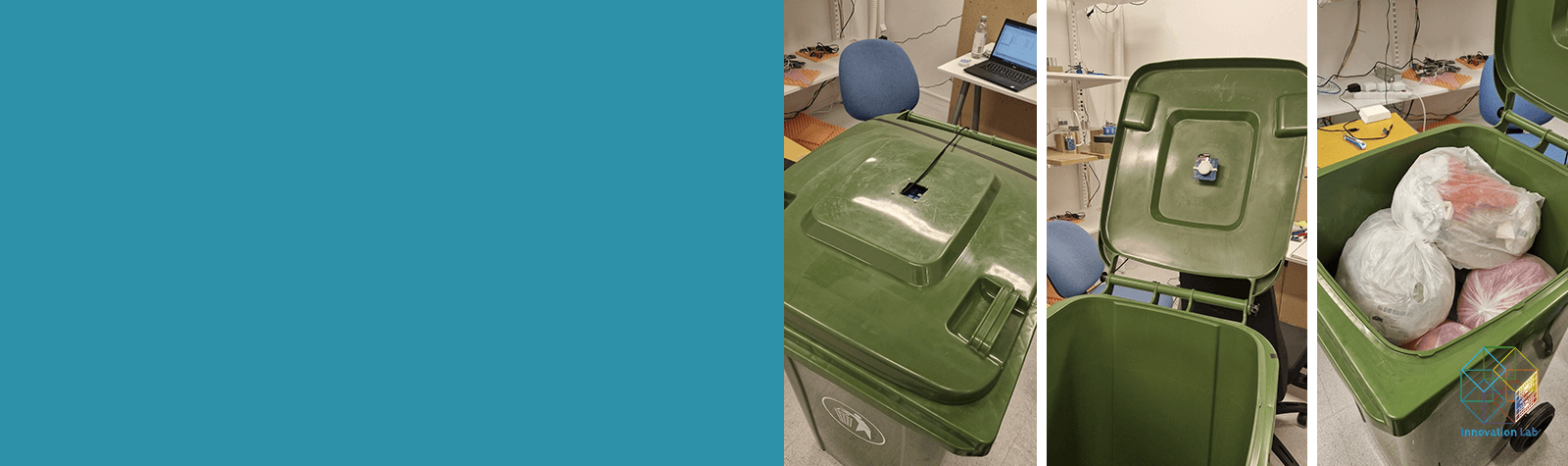
The A121 radar sensor is mounted on the lid of a bin to monitor the level of rubbish. The level of rubbish can be monitored remotely from any location including public spaces such as parks, streets, universities, shopping centres, and stadiums. This application help optimize the timing of collecting bins when they are full, plan efficient routes to collect them, and reduce the cost and environmental impact of waste collection.
The benefits of A121 radar sensor are its ability to detect the level of a bin with high accuracy, ease of mounting on a lid, and low power consumption.
In this setup, the sensor is placed in a hole in the lid of a bin. For commercial use cases, the sensor can be implemented in a battery-powered system positioned under the lid, or in a device placed to look through the plastic of a bin.
More information about the application can be found on the Acconeer document site.
This waste level management application can be implemented using the Exploration Tool and the application written in C.
FOR THE EXPLORATION TOOL
HARDWARE
One XE121 Evaluation Board, one XC120 Connector Board, one FZP Lens are used for this implementation.
- XE121 Evaluation Board can be purchased from DigiKey
- XC120 Connector Board can be purchased from DigiKey
- LH120 can be purchased from DigiKey
The lens holder, LH120, can be fit onto XE121 Evaluation Board, and then the FZP Lens is assemble.
SOFTWARE
To get started with the Evaluation kit and the Exploration tool, visit the EXPLORATION TOOL page and the Acconeer documentation page to find out information.
EXPLORATION TOOL
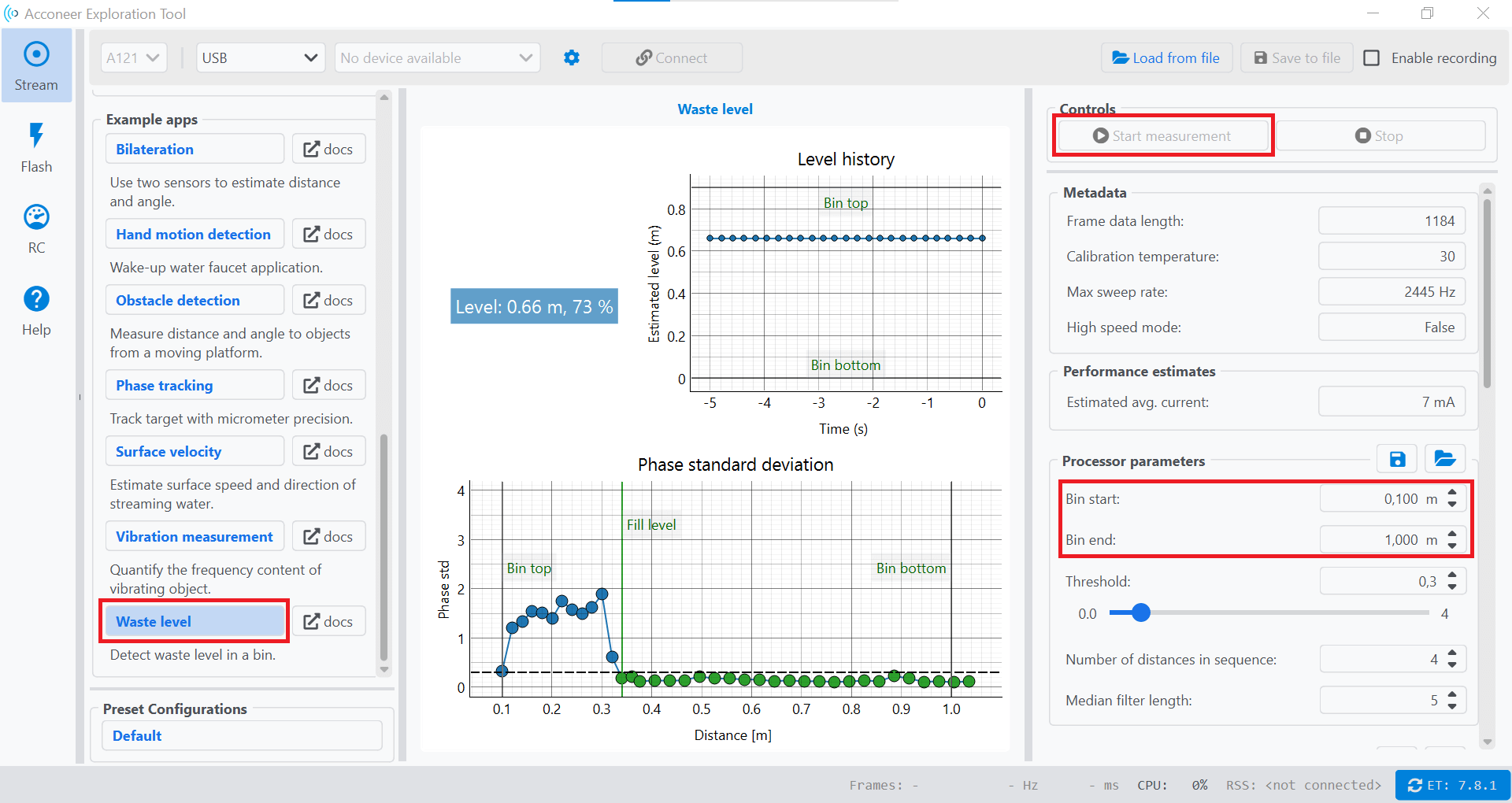
First, click “Waste level” on the left-side menu in the Exploration Tool. Then, you can adjust the settings on the right-hand menu. On processor parameters, “bin start” is the first part of the bin which the radar beam reaches. If a radar sensor is placed on top of the bin, “bin start” refers to the top of the bin and “bin end” refers to the bottom of the bin. Once the settings are adjusted, click “Start measurement” on the right-side menu to start.
FOR THE APPLICATION IN C
HARDWARE
The Entry+ Module XM125 and the XM126 IoT Module can be purchased from DigiKey.
TRY IT ON YOUR OWN AND GET IN TOUCH
If you try this, or work on something else, we’d love to hear about your project! Please get in touch with us on innovation@acconeer.com.